
السلام عليكم و رحمة الله و بركاته
في ثريد اليوم حتكلم عن متحكم الطيران (Flight Controller)
هو متحكم دقيق مزود بحساسات لحساب زاوية ميل الدرون واتجاهها وسرعتها و ارتفاعها ليتمكن من التحكم في سرعة المحركات لموازنة الدرون و توجيهها حسب الاوامر المستقبلة من المستخدم
في ثريد اليوم حتكلم عن متحكم الطيران (Flight Controller)
هو متحكم دقيق مزود بحساسات لحساب زاوية ميل الدرون واتجاهها وسرعتها و ارتفاعها ليتمكن من التحكم في سرعة المحركات لموازنة الدرون و توجيهها حسب الاوامر المستقبلة من المستخدم
اهم الحساسات التي يستعملها متحكم الطيران :
1- وحدة قياس الممانعة - Inertial measurement unit (IMU ) - : هي عبارة عن قطعة الكترونية تقوم بقياس و تحديد القوى المؤثرة على الجسم و تسارعه الزاوي و اتجاهه
1- وحدة قياس الممانعة - Inertial measurement unit (IMU ) - : هي عبارة عن قطعة الكترونية تقوم بقياس و تحديد القوى المؤثرة على الجسم و تسارعه الزاوي و اتجاهه
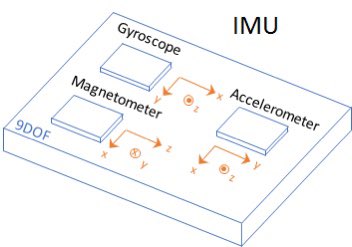
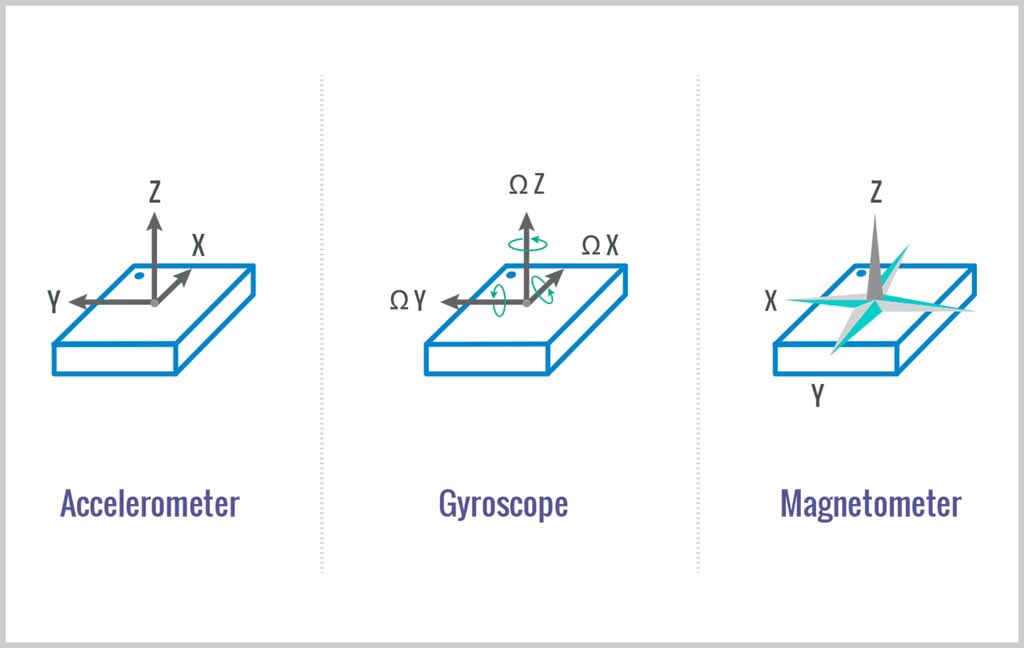
تتكون(وحدة قياس الممانعة) IMU من عدة حساسات
- حساس التسارع (Accelerometer) لحساب تسارع جسم الطائرة المسيرة
- حساس الجيروسكوب (Gyroscope ) لحساب مقدار التغير في زاوية جسم الطائرة المسيرة
- البوصلة الرقمية او ( Magnetometer ) لتحديد اتجاه جسم الطائرة المسيرة
- حساس التسارع (Accelerometer) لحساب تسارع جسم الطائرة المسيرة
- حساس الجيروسكوب (Gyroscope ) لحساب مقدار التغير في زاوية جسم الطائرة المسيرة
- البوصلة الرقمية او ( Magnetometer ) لتحديد اتجاه جسم الطائرة المسيرة
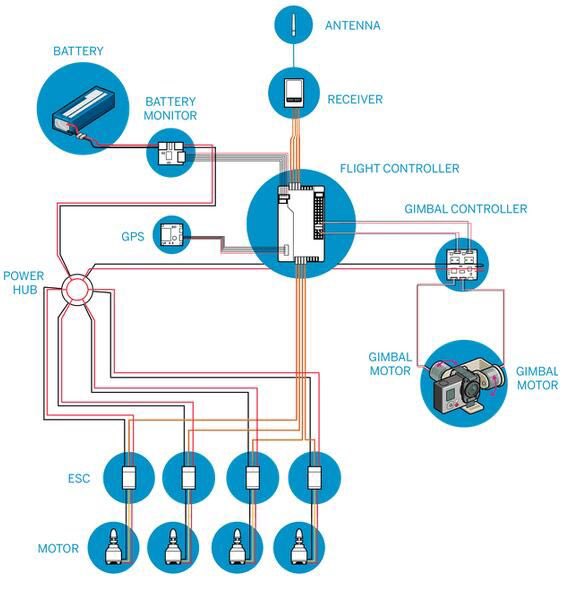
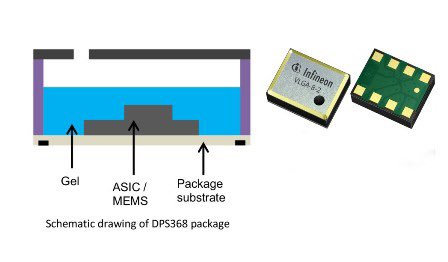
2- حساس الضغط الجوي (Barometer ) : لقياس الضغط الجوي ليتمكن المتحكم من حساب الارتفاع 3- نظام الملاحة عبر الأقمار الصناعية (GPS ) : لتحديد موقع الدرون
وظيفة متحكم الطيران :
تنقسم وظيفة متحكم الطيران الي ثلاثة اقسام رئيسية
1- الاستشعار - ( Sensing )
2- التواصل - ( Communicating )
3- التحكم - (Controlling )
تنقسم وظيفة متحكم الطيران الي ثلاثة اقسام رئيسية
1- الاستشعار - ( Sensing )
2- التواصل - ( Communicating )
3- التحكم - (Controlling )
الاستشعار - ( Sensing )
متحكم الطيران يستخدم وحدة قياس الممانعة (IMU ) لحساب التسارع و السرعة الزاوية و الاتجاه ، و حساس الضغط الجوي لمعرفة الارتفاع ، غالبا تتعرض هذه الحساسات للكثير من الضوضاء (Signal Nosie )
متحكم الطيران يستخدم وحدة قياس الممانعة (IMU ) لحساب التسارع و السرعة الزاوية و الاتجاه ، و حساس الضغط الجوي لمعرفة الارتفاع ، غالبا تتعرض هذه الحساسات للكثير من الضوضاء (Signal Nosie )
مثل : الاهتزاز الناتج عن دوران المحركات يسبب خطأ قياس التسارع و السرعة الزاوية و الاتجاه و بالتالي سيتأثر استقرار الدرون في الهواء او يؤدي الي سقوطها .
. او تعرض البوصلة (magnetometer ) للتداخل مع المجال الكهرومغناطيسي الناتج عن مرور التيار الكهربائي في الاسلاك يسبب هذا التداخل خطا في تحديد الاتجاه .
التحكم - (Controlling )
يستخدم متحكم الطيران البيانات التي حصل عليها من الحساسات لحساب السرعة المطلوبة لكل محرك
ثم يقوم بارسال السرعة المطلوبة لمتحكمات السرعة (ESC ) لتقوم بدورها بتحريك المحركات بالسرعة المطلوبة .
يستخدم متحكم الطيران البيانات التي حصل عليها من الحساسات لحساب السرعة المطلوبة لكل محرك
ثم يقوم بارسال السرعة المطلوبة لمتحكمات السرعة (ESC ) لتقوم بدورها بتحريك المحركات بالسرعة المطلوبة .
التواصل - ( Communicating )
- يستقبل متحكم الطيران الاوامر من الريموت عن طريق موجات الراديو
- يمكن لمتحكم الطيران ارسال بيانات حالة الدرون للمستخدم مثل حالة البطارية و الارتفاع و الاتجاه.
- يستقبل متحكم الطيران الاوامر من الريموت عن طريق موجات الراديو
- يمكن لمتحكم الطيران ارسال بيانات حالة الدرون للمستخدم مثل حالة البطارية و الارتفاع و الاتجاه.
اهم خوارزميات المستخدمه متحكم الطيران
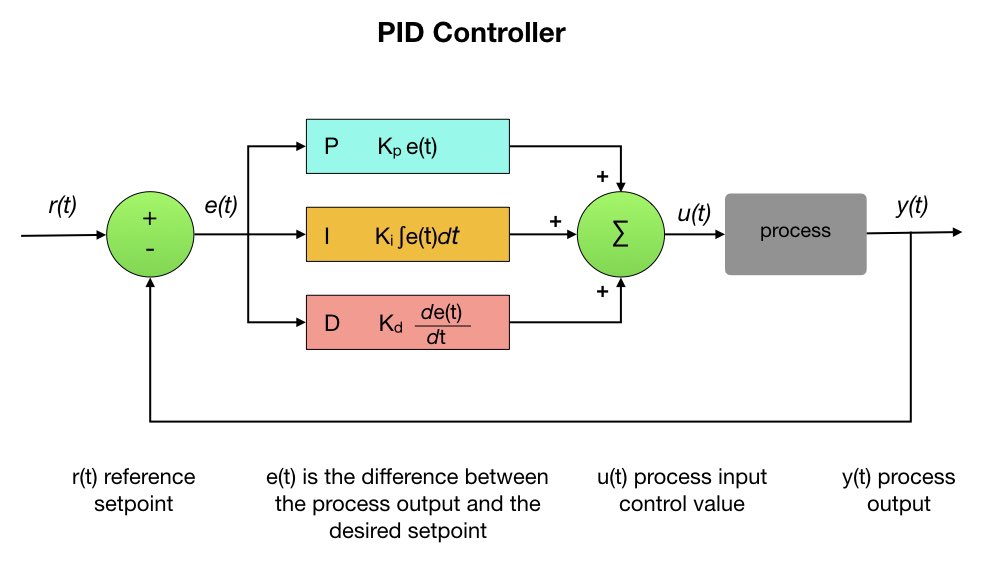
1- PID controller
يعني متحكم تناسبي + تكاملي + تفاضلي وهي المسؤولة عن تصحيح الخطأ الناتج عن الفرق بين القيمة المطلوبة والقيمة المقاسة.
youtu.be
1- PID controller
يعني متحكم تناسبي + تكاملي + تفاضلي وهي المسؤولة عن تصحيح الخطأ الناتج عن الفرق بين القيمة المطلوبة والقيمة المقاسة.
youtu.be
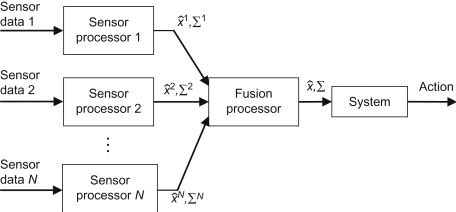
2- Sensor fusion
يقوم هذا الخوارزم بدمج بيانات اثنين من الحساسات او اكثر بطريقة تؤدي الي زيادة دقة الحسابات
youtu.be
يقوم هذا الخوارزم بدمج بيانات اثنين من الحساسات او اكثر بطريقة تؤدي الي زيادة دقة الحسابات
youtu.be
3 - Extended Kalman Filter (EKF)
يقوم بدمج جميع البيانات المتاحة و رفض البيانات التى فيها خطأ مما يجعل الدرون اقل عرضة للخطأ و يقوم ايضا بتقدير حالة الدرون مثل موقعها و سرعتها .
youtu.be
———————————————
يقوم بدمج جميع البيانات المتاحة و رفض البيانات التى فيها خطأ مما يجعل الدرون اقل عرضة للخطأ و يقوم ايضا بتقدير حالة الدرون مثل موقعها و سرعتها .
youtu.be
———————————————
جاري تحميل الاقتراحات...